В Перми инженеры-любители начали собирать робота-барабанщика. Электронный музыкант будет готов через несколько дней. Для его создания потребуется 18 часов и около 20 деталей.
Электротехники Перми начали работу над роботом-барабанщиком 15 января. Участники собираются раз в неделю, чтобы достроить уже созданную модель. Работа над YDM-роботом (Yellow Drum Machine, музыкальный робот, играющий на любой поверхности — ред.) длится третью неделю.
Формат встреч — воркшоп. Это значит, что каждый пришедший участвует в обучающем мероприятии наравне с другими и получает новые знания и навыки благодаря динамической групповой работе.
На встречи приходят в основном студенты и выпускники ПГНИУ и ПНИПУ. Они имеют разные специализации, но каждый заинтересован в том, чтобы получить новые знания, связанные с электроникой и гаджетами. Занятия проводятся для того, чтобы каждый желающий мог разобраться с основами движения механических систем (кинематике) в роботехнике на примере гусеничного привода, научиться работать с драйверами моторов. Часть деталей для будущего робота были созданы с помощью 3D-принтера.
Семен Тараканов, организатор воркшопа:
— Основная идея проведения Ардуино-митапа
— создать сообщество инициативных людей, которым интересна современная электроника и которым интересно решать актуальные задачи с помощью нее. В таком сообществе любой желающий может высказать свою идею или проблему и найти единомышленников для ее решения.
Робот-барабанщик — один из проектов сообщества.
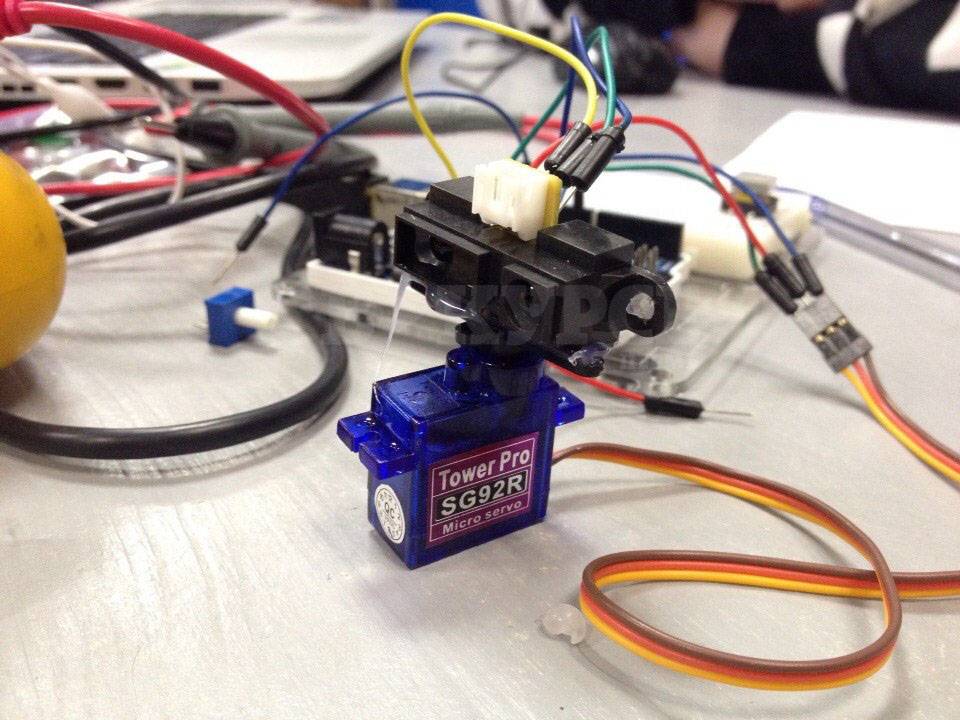
Инфракрасный дальномер, глаза робота
Сергей Тараканов, организатор воркшопа:
— Это автономный робот на гусеничной платформе, который ищет небольшие препятствия, подъезжает к ним вплотную и колотит по ним своими барабанными палочками, создавая веселый ритм.
Для того чтобы собрать робота, электротехники используют инструкцию английского журнала MAKE.
Участники сообщества провели уже два вечера совместной разработки. Команду разделили на три направления работы: гусеничная платформа, ориентация в пространстве и обработка звука.
Сергей Тараканов, организатор вокшопа:
— Первая группа уже справилась с работой
— они взяли кусок тонкой фанеры в качестве основы, два мотора-редуктора в качестве двигателей, шестеренки и набор звеньев гусеницы и микроконтроллер с драйвером двигателей. Интересно, что у нас не хватило звеньев для гусеницы, поэтому мы распечатали их на нашем 3D-принтере (синие звенья), не затратив на это много времени. Вторая группа взялась за «глаза» робота — инфракрасный дальномер, который установлен на серво-двигатель. Эта конструкция будет установлена в передней части платформы. Двигатель будет поворачивать дальномер влево и вправо, получая информацию о дистанции до ближайших препятствий. С виду это действительно похоже, как будто робот имеет глаза и оглядывается ими перед каждым поворотом. Все механизмы мы приклеили на «горячий клей»
— очень полезный инструмент при быстром прототипировании. Последняя группа работает над музыкальной начинкой робота
— записью и воспроизведением звука. По плану, робот должен записывать начальный семпл, а потом — воспроизводить его, подыгрывая ему.
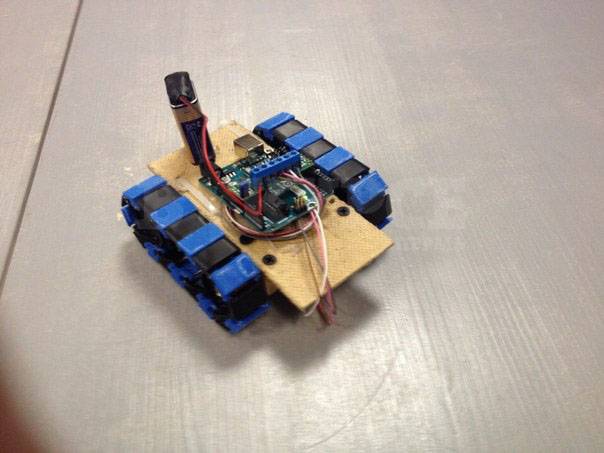
Результат двух встреч, гусеничная платформа
Робот-музыкант будет готов в ближайшие недели. По задумке участников сообщества, после воркшопа каждый сможет собрать такой у себя дома.




